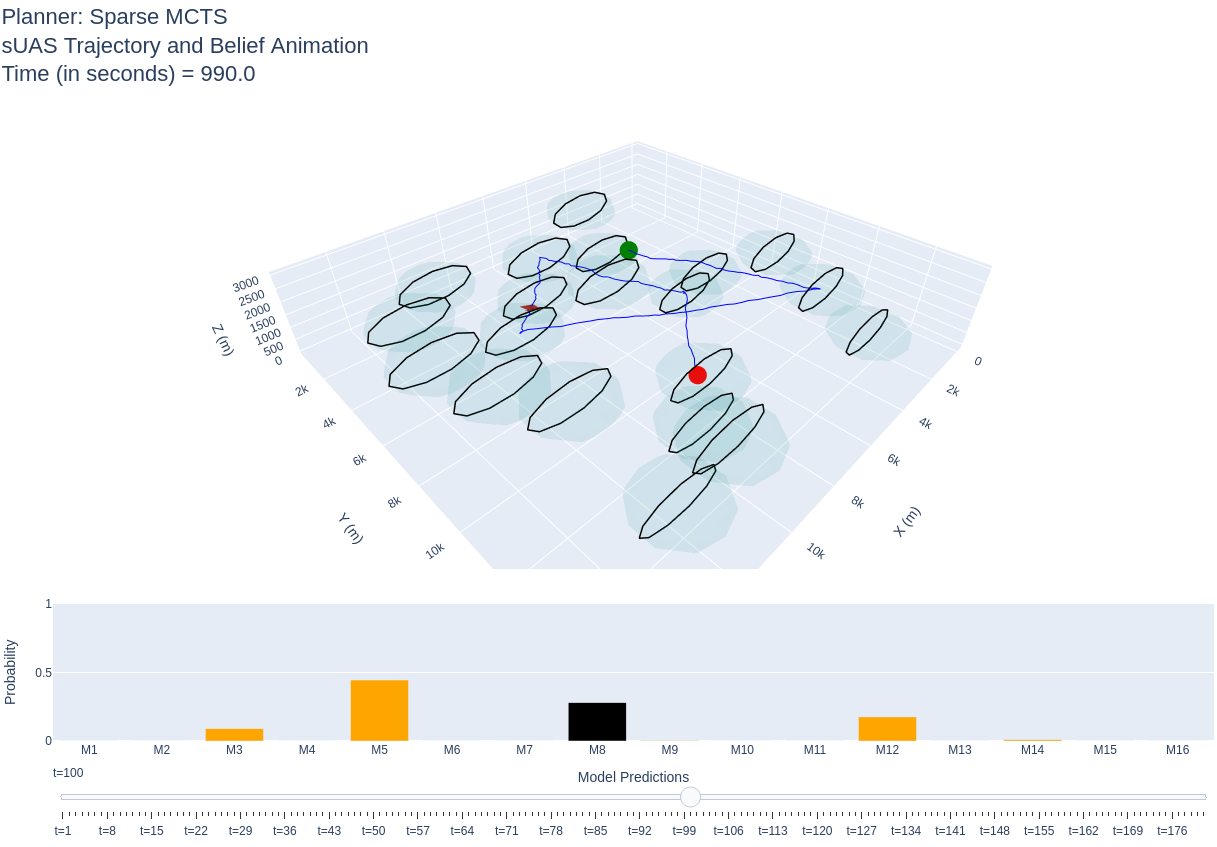
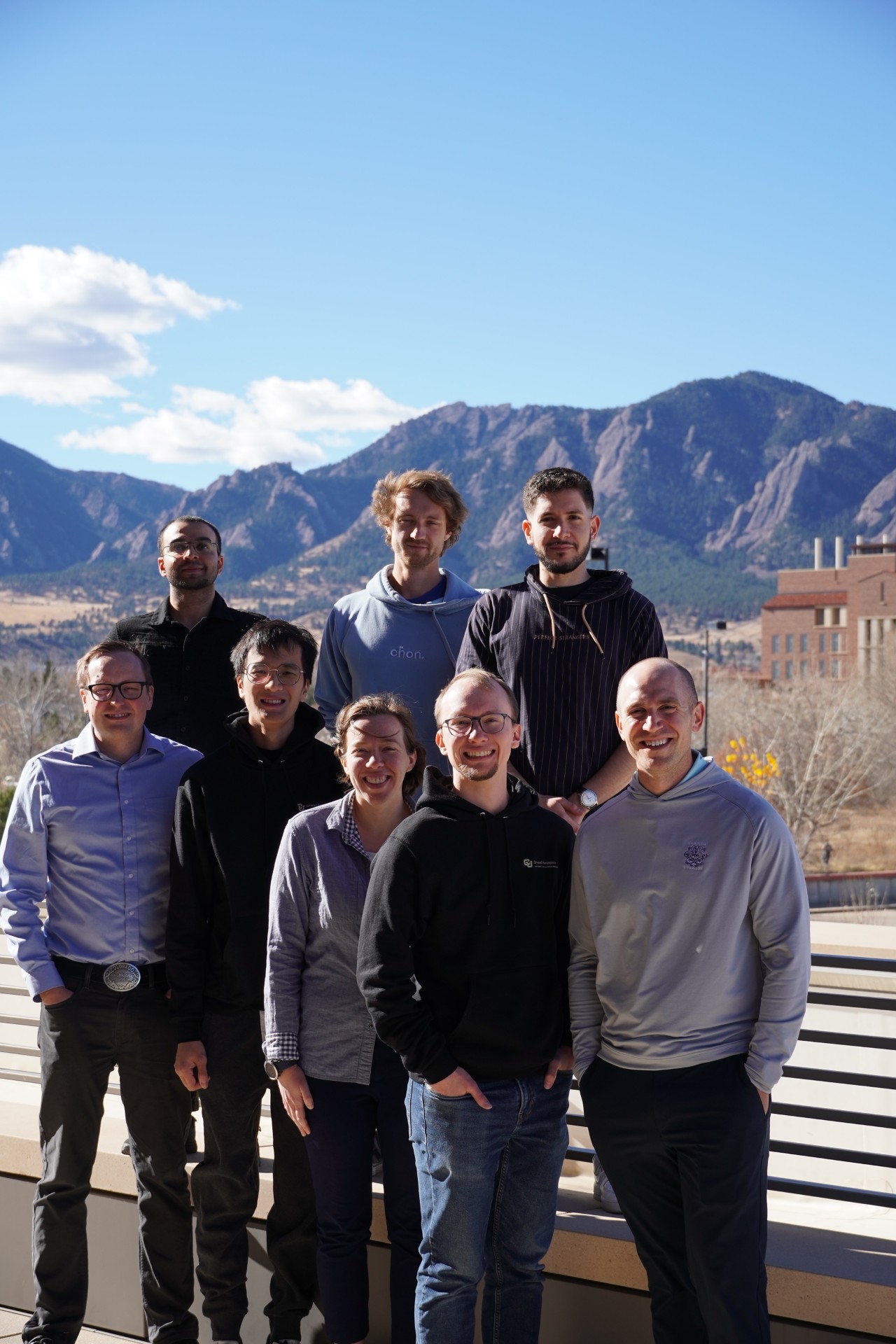
News Stay up to date with the latest ADCL news on our LinkedIn page. Follow us on LinkedIn Research We develop algorithms for sequential decision making under uncertainty, with applications in aerospace and robotics. Learn More People Meet our team working on cutting-edge autonomy research. Meet the Team